ARIEL Modular Robot¶
An introduction to modular robots¶
Note: This introduction applies to V2 robots. V1 robots are only used internally in the CI Group.
Modular robots are built from a flexible set of modules and sensors. A central brain controls the robot, which can read the sensors to make decisions.
The modular robot system in ARIEL is based on the RoboGen system.[^1] It is highly extensible, making it possible to adjust ARIEL to include custom modules and sensors not readily available in the standard set.
Modules¶
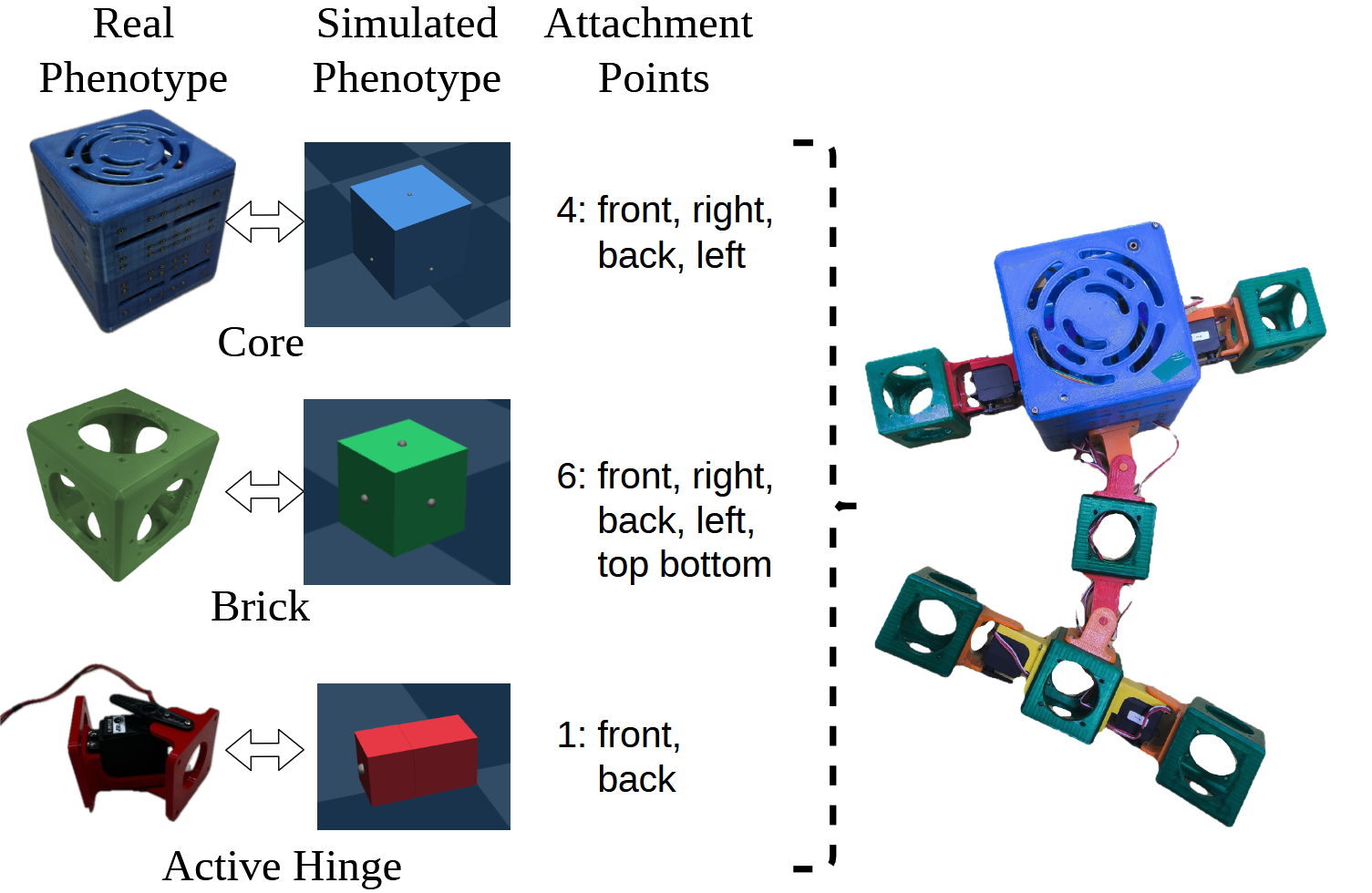
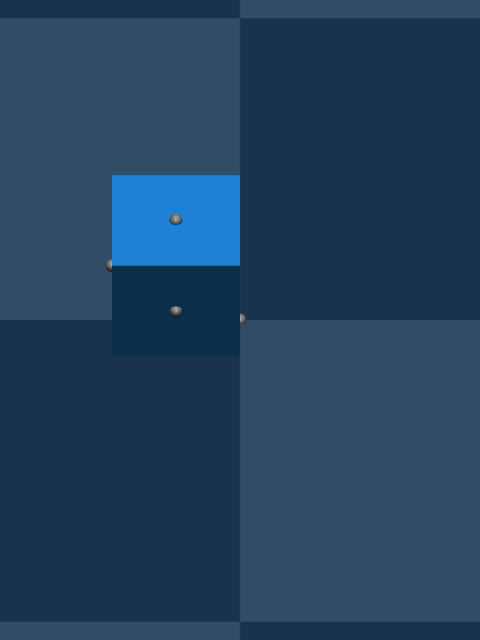
Robots are constructed using different types of physical components. At the center of the robot lies the core module, which contains the brain.
Core Module¶

Other modules are attached to the core on its various sides to build out the robot’s body.
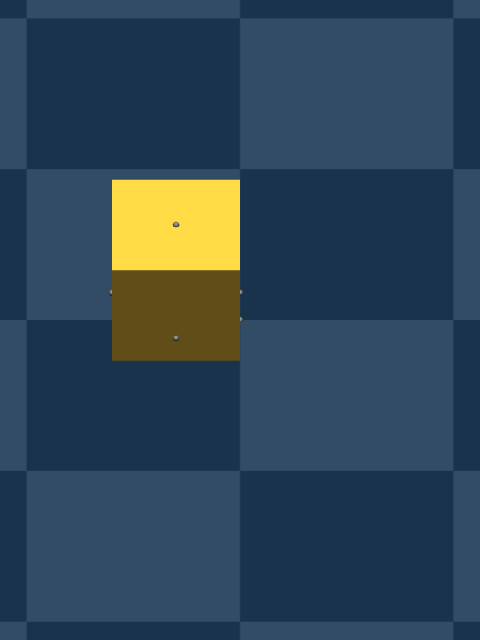
Brick Module¶
 Bricks are passive blocks used for structural support. Additional modules can be attached to them to extend the robot’s shape.
Bricks are passive blocks used for structural support. Additional modules can be attached to them to extend the robot’s shape.
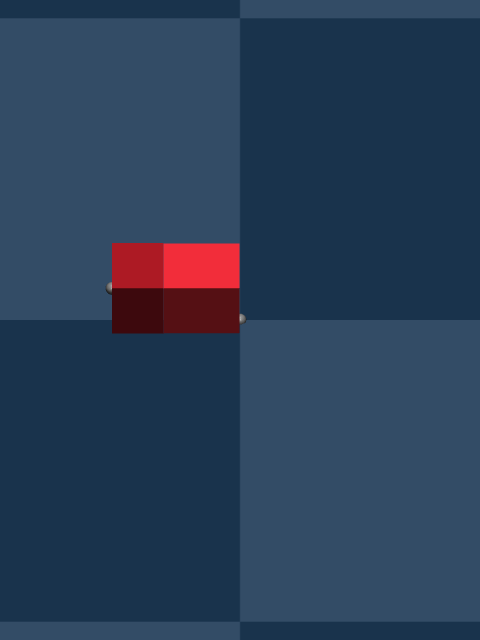
Active Hinge Module¶
 Active hinges are revolute joints. These are the moving parts of the robot and are controlled directly by the robot’s brain.
Active hinges are revolute joints. These are the moving parts of the robot and are controlled directly by the robot’s brain.
Sensors¶
Currently, the brain can only read the current position of each servo. This functionality works seamlessly in both software simulation and on real hardware.
Simulation of the modules¶
[1]:
# Helper function to show modules
from helper import show_module
[2]:
show_module("core")
[2]:
[3]:
show_module("brick")
[3]:
[4]:
show_module("hinge")
[4]: